
La limpieza de los océanos se ha convertido en una tarea urgente debido al nivel de contaminación que ha alcanzado las masas de agua de la Tierra. Una de las estrategias para combatir los montones de residuos que se encuentran en estos sensibles ecosistemas -especialmente alrededor de los arrecifes de coral- es emplear robots.
PUBLICIDAD
Sin embargo, las tecnologías existentes son en su mayoría voluminosas, de cuerpo rígido, incapaces de explorar y tomar muestras en entornos complejos y desestructurados, y ruidosas debido a los motores eléctricos o las bombas hidráulicas.
Para conseguir un diseño más adecuado, los científicos del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Stuttgart se inspiraron en la naturaleza. Configuraron un robot del tamaño de una mano, inspirado en las medusas, que es versátil, eficiente energéticamente y casi insonoro.
Para construir el robot, el equipo utilizó accionadores electrohidráulicos por los que fluye electricidad. Actúan como músculos artificiales que impulsan al robot. Alrededor de estos músculos hay cojines de aire y componentes blandos y rígidos que estabilizan el robot y lo hacen impermeable.
De este modo, el alto voltaje que fluye por los accionadores no puede entrar en contacto con el agua circundante. Una fuente de alimentación suministra periódicamente electricidad a través de finos cables, lo que hace que los músculos se contraigan y se expandan. Esto permite al robot nadar con gracia y crear remolinos bajo su cuerpo.
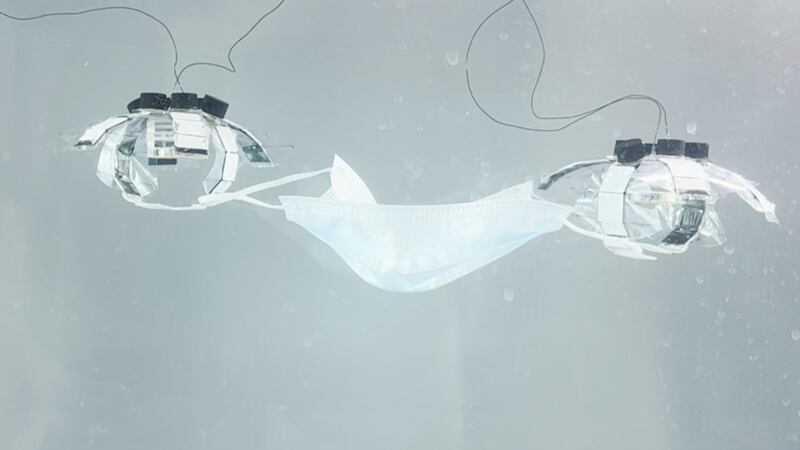
“Cuando una medusa nada hacia arriba, puede atrapar objetos a su paso al crear corrientes alrededor de su cuerpo. De este modo, también puede recoger nutrientes. Nuestro robot también hace circular el agua a su alrededor. Esta función es útil para recoger objetos como partículas de desecho. Luego puede transportar la basura a la superficie, donde más tarde puede ser reciclada”, explicó Tianlu Wang, investigador postdoctoral del Departamento de Inteligencia Física del MPI-IS y primer autor de la publicación.
Los robots-medusa (Jellyfish-Bot) son capaces de mover y atrapar objetos sin contacto físico, trabajando solos o con varios en combinación. Cada robot funciona más rápido que otros inventos comparables, alcanzando una velocidad de hasta 6,1 cm/s. Además, la tecnología sólo requiere una baja potencia de entrada, de unos 100 mW.
PUBLICIDAD
El ruido del robot es indistinguible de los niveles de fondo. Así, robot-medusa interactúa suavemente con su entorno sin perturbarlo, igual que su homólogo natural.
Metro habló con Christoph Keplinger, director del Instituto Max Planck de Sistemas Inteligentes, para saber más.
“Se calcula que el 70% de la basura marina se hunde en el lecho marino. Los plásticos constituyen más del 60% de esta basura y tardan cientos de años en degradarse. Por eso vimos la necesidad urgente de desarrollar un robot que manipulara objetos como la basura y los transportara hacia arriba. Esperamos que los robots submarinos puedan ayudar algún día a limpiar nuestros océanos”.
— Hyeong-Joon Joo, estudiante de doctorado del Departamento de Materiales Robóticos del Instituto Max Planck
Ve un video sobre el robot-medusa:
Otros robots que limpian los océanos
Clearbot
Este pequeño robot de Ocean Cleanup funciona con una batería que se carga con la luz solar. Se descarga automáticamente en su estación y se carga dirigiendo su boca (que siempre está abierta) hacia la basura que detecta. Puede almacenar hasta 200 litros de residuos y limpiar casi 1 kilómetro de superficie en 8 horas.
Pez robot
Un pez robot que filtra microplásticos se convirtió en el proyecto ganador del concurso público de tecnología de la Universidad de Surrey llamado Natural Robotics Contest. El diseño del pez robot llamado Gillbert, obra de una estudiante llamada Eleanor Mackintosh, fue seleccionado por un jurado internacional porque podría formar parte de una solución para minimizar la contaminación por plásticos en nuestras vías fluviales y mares.
Row-Bot
Row-Bot limpia los residuos y genera electricidad que utiliza como combustible para su propio uso. El comportamiento y la funcionalidad de este pequeño robot se basan en un pequeño animal conocido como barquero de agua, un insecto acuático que se alimenta de algas y plantas muertas mientras traga agua sucia.
Entrevista
Christoph Keplinger,
director del Instituto Max Planck de Sistemas Inteligentes
P: ¿Por qué eligió las medusas como fuente de inspiración para su robot?
- En la naturaleza, las medusas son uno de los animales submarinos que menos energía consumen gracias a sus modos de locomoción, es decir, la natación a base de chorros o remadas. Además, la forma de nadar de las medusas combina una propulsión fluídica eficaz con la manipulación de objetos, lo que resulta beneficioso para la depredación. Además, su estructura corporal blanda y deformable les permite adaptarse a entornos desestructurados y navegar por ellos. Estas propiedades hacen de las medusas uno de los modelos animales más populares para guiar el diseño de una nueva generación de vehículos submarinos.
P: ¿Cómo funciona el Jellyfish-Bot?
- El robot tiene seis “lappets” (patas), cada una de las cuales puede controlarse individualmente para diversas funciones. Cada lappet tiene tres articulaciones rotativas flexibles accionadas por actuadores electrostáticos autorregenerables amplificados hidráulicamente. En este estudio, el voltaje de actuación se aplicó al electrodo impreso en carbono de la carcasa de polímero, que encapsulaba el dieléctrico líquido. El agua circundante se utilizó como tierra eléctrica conductora. Cuando el voltaje estaba activado, la tensión de Maxwell entre el electrodo de carbono y el agua conectada a tierra inducía un movimiento de cremallera de las dos caras de la cubierta de polímero, desplazaba el líquido dieléctrico y aumentaba la presión en el interior del actuador. Dado que uno de los lados de la carcasa estaba fijado a dos eslabones rígidos, el aumento de presión hizo girar la estructura unida. Gracias al movimiento giratorio simultáneo de los actuadores en cada lapa, se podían generar fuertes fuerzas para remar.
P: ¿Cómo funciona la recogida de residuos sin contacto?
- El robot podría recoger las partículas de residuos tanto sin contacto como con contacto. Cuando una medusa se propulsa hacia delante, el fluido circundante entra en la trayectoria de movimiento por el campo de presión y es arrastrado junto con el cuerpo. Las medusas pueden utilizar estas características y controlar los patrones de flujo del fluido para atrapar a sus presas. Del mismo modo, nuestro robot también puede manipular los objetos circundantes sin contacto utilizando dichos flujos fluídicos. Así es como funciona la recogida sin contacto.
Además, dado que el accionamiento electrohidráulico directo se produce en el diseño de nuestro robot sin necesidad de voluminosos mecanismos intermedios de transmisión del movimiento, resulta práctico controlar individualmente cada lappet para que puedan utilizarse para diversas funciones. Por ejemplo, dos lappets se pueden accionar juntos como pinzas, mientras que los cuatro restantes se pueden accionar como hélices. Así podríamos recoger objetos por contacto.
P: ¿Espera que su robot limpie los océanos en el futuro?
- En la fase actual, hemos demostrado que se puede conseguir un prototipo inalámbrico y que dos o más robots pueden cooperar para realizar otras tareas, lo que resulta prometedor para usos en exteriores. En el futuro, el robot medusa podrá mejorarse en cuanto a materiales, electrónica y sistema en general, de modo que pueda cooperar en equipo para limpiar el medio ambiente.


